Our robotic submersible Autosub6000 was
heading for its last survey line during mission M136, at a depth of 3400m, when
we were suddenly called off by a ‘mayday’ call from a transatlantic yacht.
Leaving the sub to finish a tricky mission surveying the steep flanks of Tropic
Seamount was risky: the sub could get lost and as evening was drawing in, it
would surface in the dark. As we were the nearest available ship, only one and
a half hours away, we immediately pulled off and made full speed to rescue the
yacht’s crew.
 |
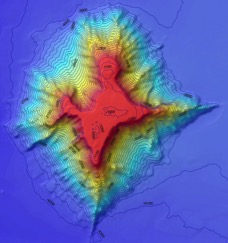
| Ship’s log showing a record-breaking 17kts on route to rescue the crew from the stricken yacht ‘Noah’. |
The 36ft yacht ‘Noah’ was taking in water
fast and the crew of three adults and two children told us they were preparing
to abandon ship in their small inflatable life raft. With some anxiety over the
threat to the safety of the yacht’s crew, Jim, our captain, requested Bob the
chief engineer to give the RRS James Cook full power to all four of its
engines. Making a record 17 kts, we arrived within an hour and in time to find
the ‘Noah’ sinking and her five members of crew in a yellow life raft.
 |
Stricken
yacht ‘Noah, just a few hours before it sank, with her life raft containing the
crew of five including two children.
|
The Grefrath family: skipper
Alexander, his wife Alexandra, their two sons aged 10 and 12, and fellow crew
member Jörg Zeibig, had left Grand Canaria on the 20th of November
on route to St Lucia. Just after 2pm Wednesday, they sent an SOS message out
saying their yacht was taking in water. Their pumps were overwhelmed and they
were sinking.
 |
The officers and crew of the RRS James Cook
displayed the highest levels of seamanship in rescuing the crew of the ‘Noah’,
bringing them safely aboard without any getting wet or cold.
|
The crew of the RRS James Cook handled the situation
professionally and with great seamanship. First off the life raft was Jörg,
followed by Alexandra and the two kids. The last to leave was skipper Alexander.
All climbed aboard the RRS James Cook safely and were given blankets and shown
to the chief scientists quarters for the duration. Despite their ordeal, the
kids soon settled in and within a couple of hours had found a play-station in
the lounge and were playing the racing car and football games. The following
day, the rescued crew were taken on tours of the science labs, the AUV and ROV.
Bob put on a special tour of the engine room, which the two kids especially enjoyed.
 |
The Grefrath family being given a tour of the
ROV ‘Isis’ by Ross (left).
|
After going back to
retrieve our AUV, we steamed to Tenerife to drop the family off in the early
hours of Friday morning. To save time, we had the shortest port-call on record,
with the gangway put down and hauled back up in just 30 minutes. Jim made a phone call to headquarters
and we were allowed to use three engines on our way back to Tropic Seamount.
This uses a lot more fuel and special permission was required. As a result, the
rescue and detour only cost us 60 hours; a small price to pay for a happy-ending
to an otherwise harrowing ordeal for the crew of the ‘Noah’.
 |
The
ship’s company gives a warm send-off to the crew of the ‘Noah’.
|